sinovoip
(bpi team)
1
Banan pi test image : run node-red ros tensorflow opencv mqtt Wiringpi rpi.gpio AI function test
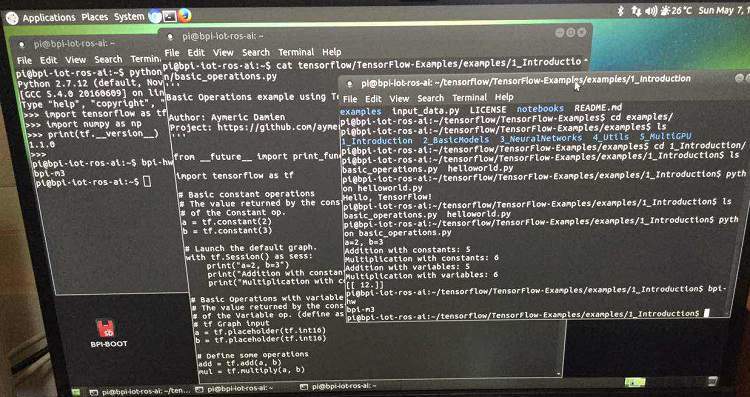
BPI-M3: run demo code base on tensorflow 1.1.0
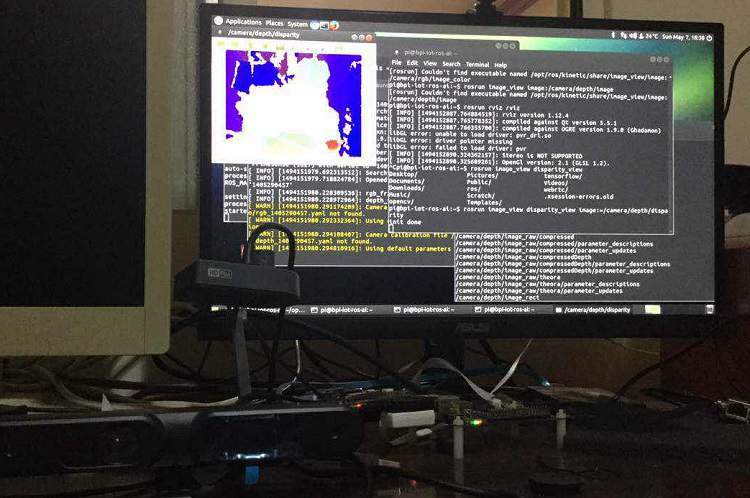

use ros image_view function to display ,Support openni depth camera images
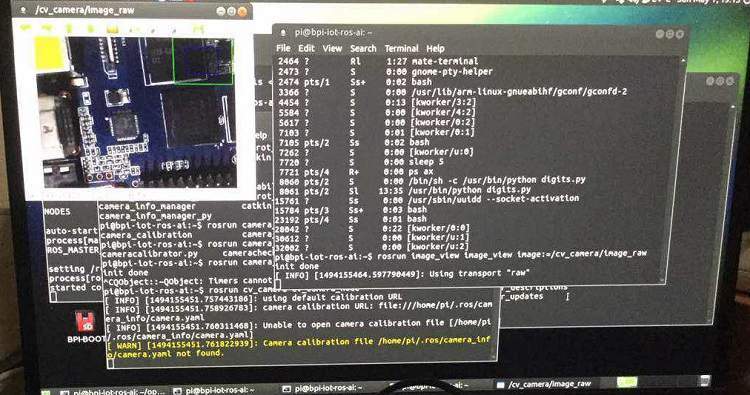
Using ros image view function display uvc camera images
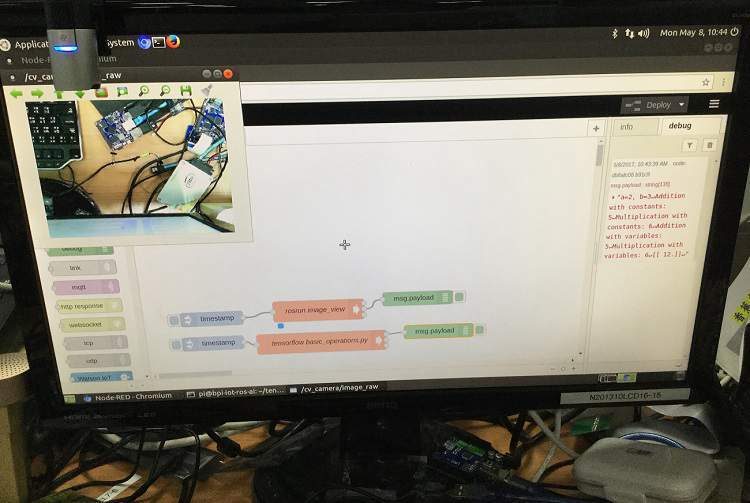
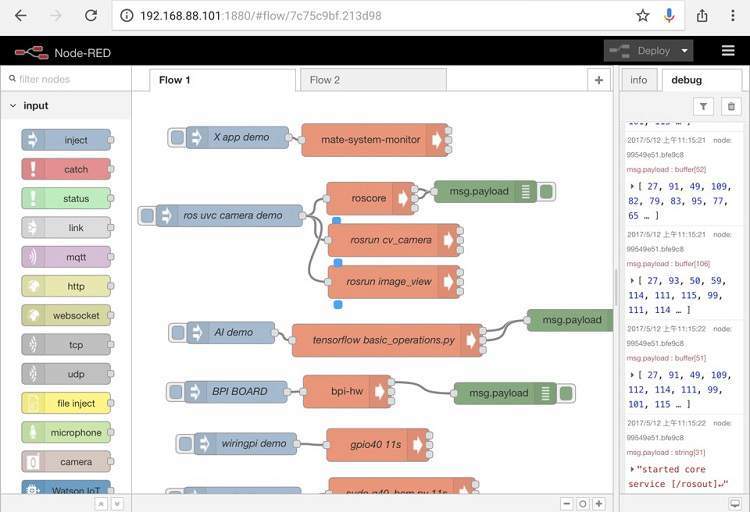
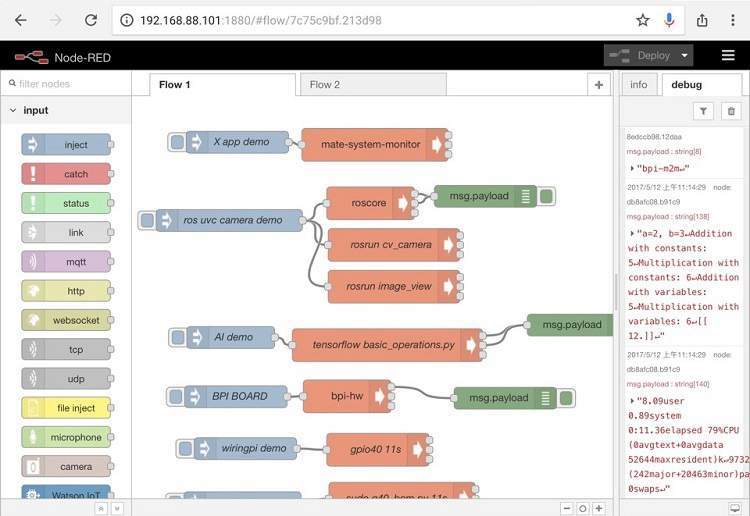
On the node-red direct execution of ros image view function and tensorflow demo program
Note : image have install ros kinetic full package on it ,so must use 16G SD card to born this image
How to Connect Your Internet of Things with Node-RED on Ubuntu 16.04
test image download link:
for BPI-M3 baord:
2017-05-07-ubuntu-16.04-mate-nodered-ros-tensorflow-preview-bpi-m3-sd-16GB.img.zip
for BPI-M2 Ultra
2017-05-07-ubuntu-16.04-mate-nodered-ros-tensorflow-preview-bpi-m2u-sd-16GB.img.zip
for BPI-M2+
for BPI-M1/M1+/R1
for BPI-M2 magic
shahzaib
(Shahzaib Abbas Qumber)
2
Very Nice Work.I’m downloading It now.I love to do work on it.
1 Like
sinovoip
(bpi team)
3
thank you ,hope you can help us to do more 
sinovoip
(bpi team)
4
How to Connect Your Internet of Things with Node-RED on Ubuntu 16.04







