Use the debug interface /sys/devices/platform/1000b000.pinctrl/mt_gpio, please refer to script 1
Use the general interface for GPIO: /sys/class/gpio/export and /sys/class/gpio/unexport, please refer to script 2
Script 1 (it can be used on Ubuntu system with kernel 4.4.x)
SYS_FILE=/sys/devices/platform/1000b000.pinctrl/mt_gpio
mt_gpio_mode()
{
pin=$1
mode=$2
if [ ! -f ${SYS_FILE} ]; then
exit 1
fi
echo "mode $pin $mode" > ${SYS_FILE}
return 0
}
mt_gpio_dir()
{
pin=$1
dir=$2
if [ "x${dir}" == "xout" ]; then
dir_val=1
else
dir_val=0
fi
if [ ! -f ${SYS_FILE} ]; then
exit 1
fi
echo "dir $pin $dir_val" > ${SYS_FILE}
return 0
}
mt_gpio_out()
{
pin=$1
out=$2
if [ ! -f ${SYS_FILE} ]; then
exit 1
fi
echo "out $pin $out" > ${SYS_FILE}
return 0
}
mt_gpio_in()
{
pin=$1
if [ ! -f ${SYS_FILE} ]; then
exit 1
fi
echo "start $1" > ${SYS_FILE}
result=`cat ${SYS_FILE} | grep "$1"`
if [ "x${result}" == "x" ]; then
echo "can't get $pin status"
exit 2
fi
echo ${result}
pin_val=`echo ${result} | awk -F ' |-' '{print $5}'`
if [ ${pin_val} == "0" ] ; then
return 0
else
return 1
fi
return 0
}
Script 2 (it can be used on Ubuntu system with kernel 4.4.x, and lede with kernel 4.9.x)
#!/bin/ash
DIR=/sys/class/gpio/
global_gpio_offset=0
mt_gpio_init()
{
pin=$1
EXPORT=/sys/class/gpio/export
UNEXPORT=/sys/class/gpio/unexport
name=`ls $DIR | grep chip`
if [ x${name} != x ]; then
echo "chip id : $name"
else
echo "No available gpio chip"
exit 1
fi
base=`cat ${DIR}/${name}/base`
gpio_offset=`echo $((base+$pin))`
global_gpio_offset=$gpio_offset
if [ -d ${DIR}/gpio${gpio_offset} ]; then
return 0
else
echo ${gpio_offset} > ${EXPORT}
fi
}
mt_gpio_init $1
if [ $2 == 'dir' ]; then
if [ $3 == 'out' ]; then
echo out > ${DIR}/gpio${global_gpio_offset}/direction
else
echo in > ${DIR}/gpio${global_gpio_offset}/direction
fi
elif [ $2 == 'val' ]; then
if [ $# == 2 ]; then
cat ${DIR}/gpio${global_gpio_offset}/value
elif [ $# == 3 ]; then
echo $3 > ${DIR}/gpio${global_gpio_offset}/value
fi
fi
Hi, I was missing support in WiringPi for BPI R2 so I forked @chaotaklon repo from this post and I added support for GPIO for now. I tested few GPIO ports and it works fine. I also had to fix port mapping.
When you use wiringPiSetup(), you can use ports from column wPi from gpio readall or you can use physical pin numbering by calling wiringPiSetupPhys().
why do you try to set direction of i2c pins? do you want i2c function or not? if not you have to disable i2c0 ( 11007000.i2c) in dts. imho it is not possible to change function in running system
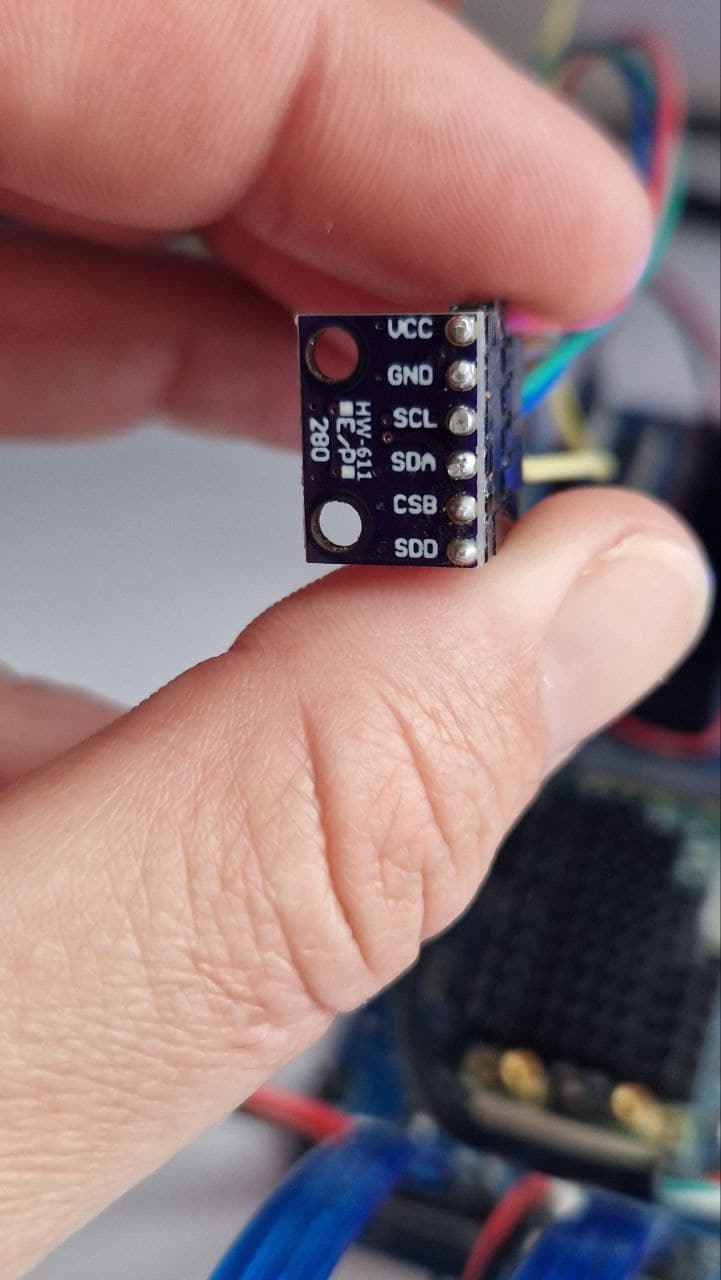
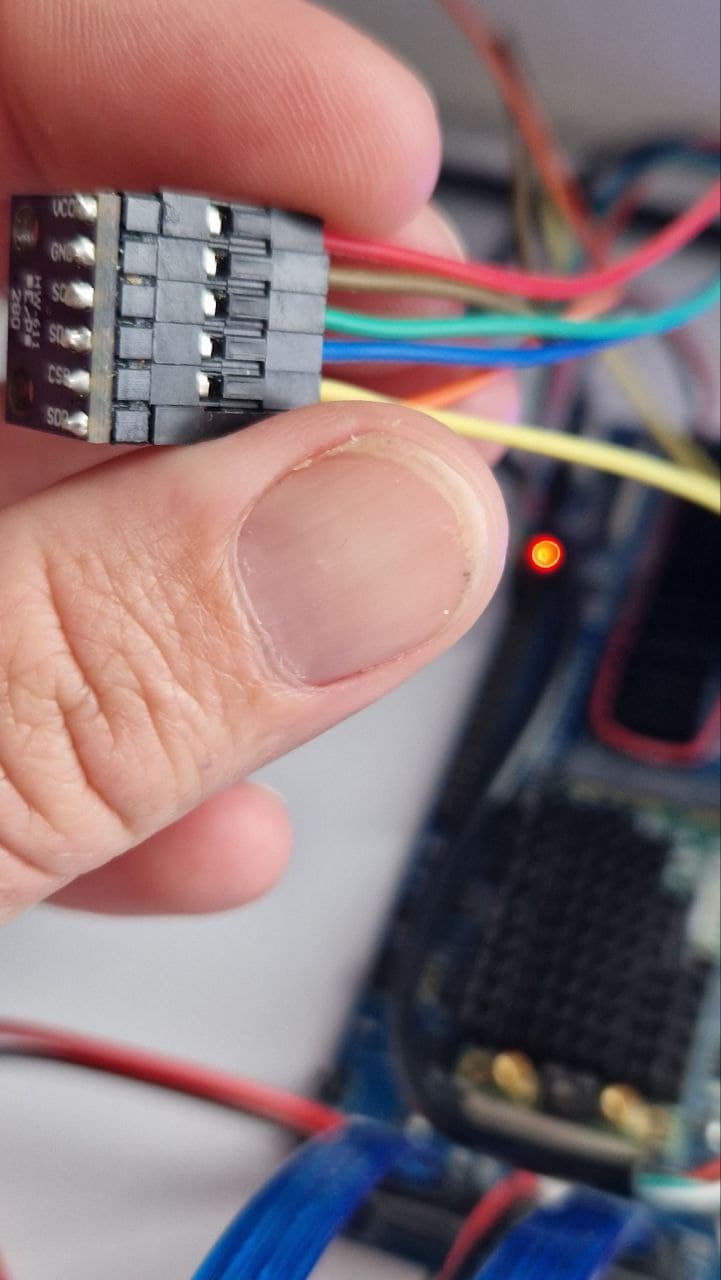
I do require I2C. And this all is just an effort to find out what is wrong, because when I take a multimetter between PIN#1 and GND, I do not measure any voltage. Secondly, While having BMP280 wired correctly (it works on my old RouterStations as well as on OrangePi One+ units I have), it is not detected and I can’t read temperature and pressure.
I am not certain if I2C works at all in this regard, and I am puzzled why I do not measure 3.3V on designated PINs as I should. What is also confusing is that the PIN numbering and GPIO naming is very different (but I found my way to identify pins).
So no, I do not need to disable I2C. I need to make it working.
I do know already that I2C0 is designated to mediatek hdmi. But I do not register the BMP280 on I2C1 or I2C2.
As for I2C - yes, I do realize that it is mapped to i2c1, that is not the problem.
As for voltage - that is actually what I was dealing with - I can’t measure 3.3V on dedicated pins.
There is nothing on those pins (#1, #17). I mean - the voltage fluctuates between -0.2V and +0.2V.
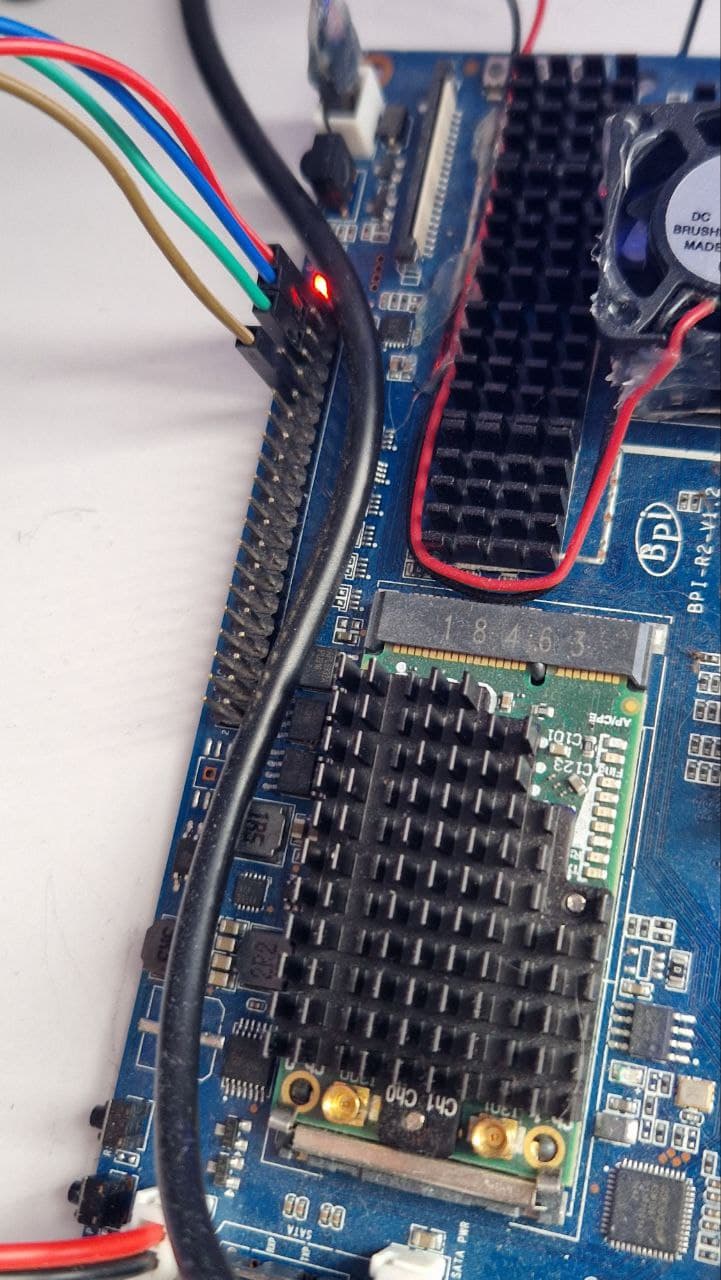
Just to check - having SATA ports pointing to the ground (down), GPIO pinouts on the left - PIN#1 is topmost left pin, right? Topmost right is 5V, correct?
The problem is that I do not measure 3.3V or 5V on either pins.