Please refer to below script and then run commands source mt_gpio.sh
mt_gpio_mode 200 0
mt_gpio_dir 200 in
mt_gpio_value 200 | echo $?
mt_gpio.sh
SYS_FILE=/sys/devices/platform/1000b000.pinctrl/mt_gpio
mt_gpio_mode()
{
pin=$1
mode=$2
if [ ! -f ${SYS_FILE} ]; then
exit 1
fi
echo "mode $pin $mode" > ${SYS_FILE}
return 0
}
mt_gpio_dir()
{
pin=$1
dir=$2
if [ "x${dir}" == "xout" ]; then
dir_val=1
else
dir_val=0
fi
if [ ! -f ${SYS_FILE} ]; then
exit 1
fi
echo "dir $pin $dir_val" > ${SYS_FILE}
return 0
}
mt_gpio_out()
{
pin=$1
out=$2
if [ ! -f ${SYS_FILE} ]; then
exit 1
fi
echo "out $pin $out" > ${SYS_FILE}
return 0
}
mt_gpio_in()
{
pin=$1
if [ ! -f ${SYS_FILE} ]; then
exit 1
fi
echo "start $1" > ${SYS_FILE}
result=`cat ${SYS_FILE} | grep "$1"`
if [ "x${result}" == "x" ]; then
echo "can't get $pin status"
exit 2
fi
echo ${result}
pin_val=`echo ${result} | awk -F ' |-' '{print $5}'`
if [ ${pin_val} == "0" ] ; then
return 0
else
return 1
fi
return 0
}
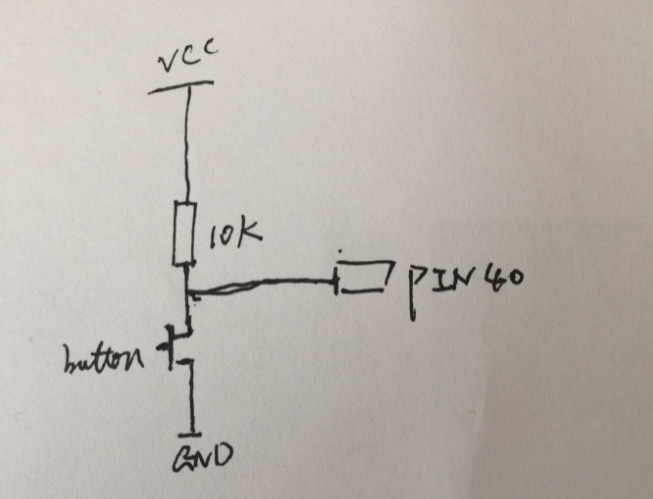
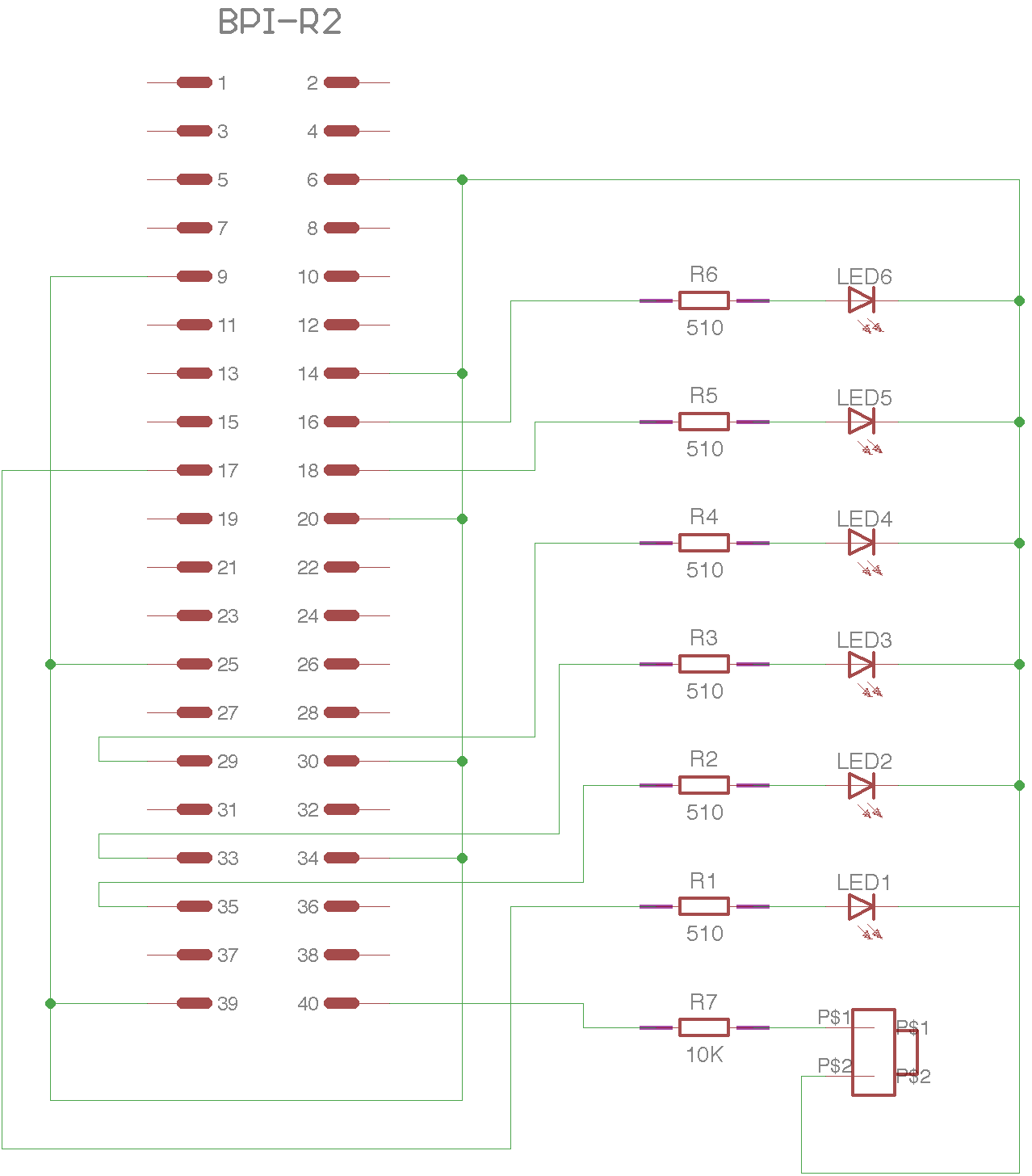 this my scheme
this my scheme