BPI-M2 Berry use GY-521 Six-axis attitude sensor.
Gy-521 is the 6DOF sensor with the three-axis acceleration and three-axis gyroscope with MPU6050 module. The following author will introduce the method of reading attitude data using I2C.

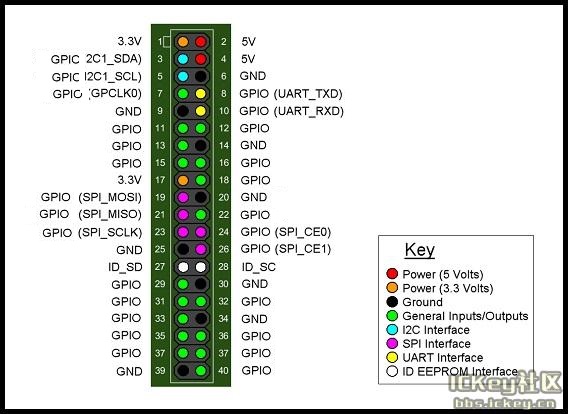
Gy-521 GND VCC SDA SCL was connected to GND VCC SDA SCL of banana pie bpi-m2 Berry development board.
Then power the development board and log in to the terminal to enter the following command .i2c-tools and python-smbus
sudo apt-get install i2c-tools python-smbus
Then enter the following command to view the I2C interface location.
ls /dev
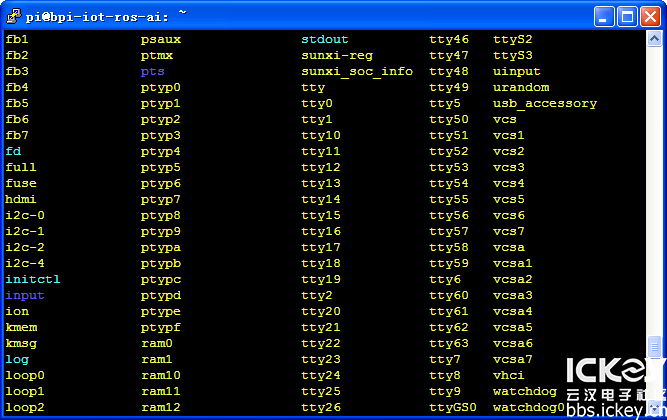
then you can see it have i2c-0 i2c-1 i2c-2 i2c-4,
i2cdetect -y number
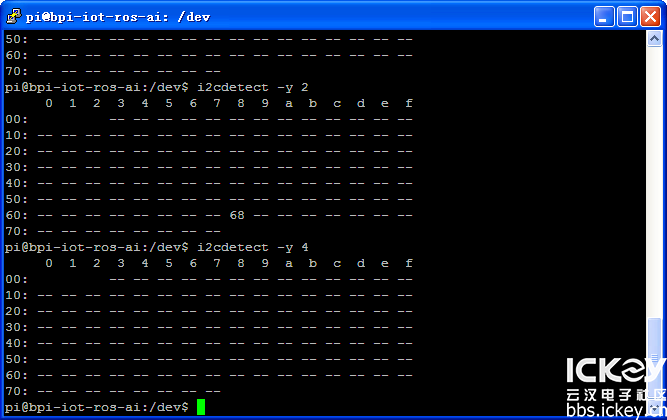
From the figure above, you can see gy-521 on i2c-2, and enter the following command to create the python script mp6050.py.
vi mp6050.py
Enter the following code
import smbus
import time
bus = smbus.SMBus(2)
bus.write_byte_data(0x68, 0x6b, 0)
while True:
gyro_data = bus.read_i2c_block_data(0x68, 0x43, 6)
accel_data = bus.read_i2c_block_data(0x68, 0x3b, 6)
gyro_x = ((gyro_data[0] << 8) + gyro_data[1])
gyro_y = ((gyro_data[2] << 8) + gyro_data[3])
gyro_z = ((gyro_data[4] << 8) + gyro_data[5])
accel_x = ((accel_data[0] << 8) + accel_data[1])
accel_y = ((accel_data[2] << 8) + accel_data[3])
accel_z = ((accel_data[4] << 8) + accel_data[5])
print('gyro: x=%05d, y=%05d, z=%05d \t\t accel: x=%05d, y=%05d, z=%05d'%(gyro_x,gyro_y,gyro_z,accel_x,accel_y,accel_z))
time.sleep(1)
After the ESC key is saved, enter the following command to run.
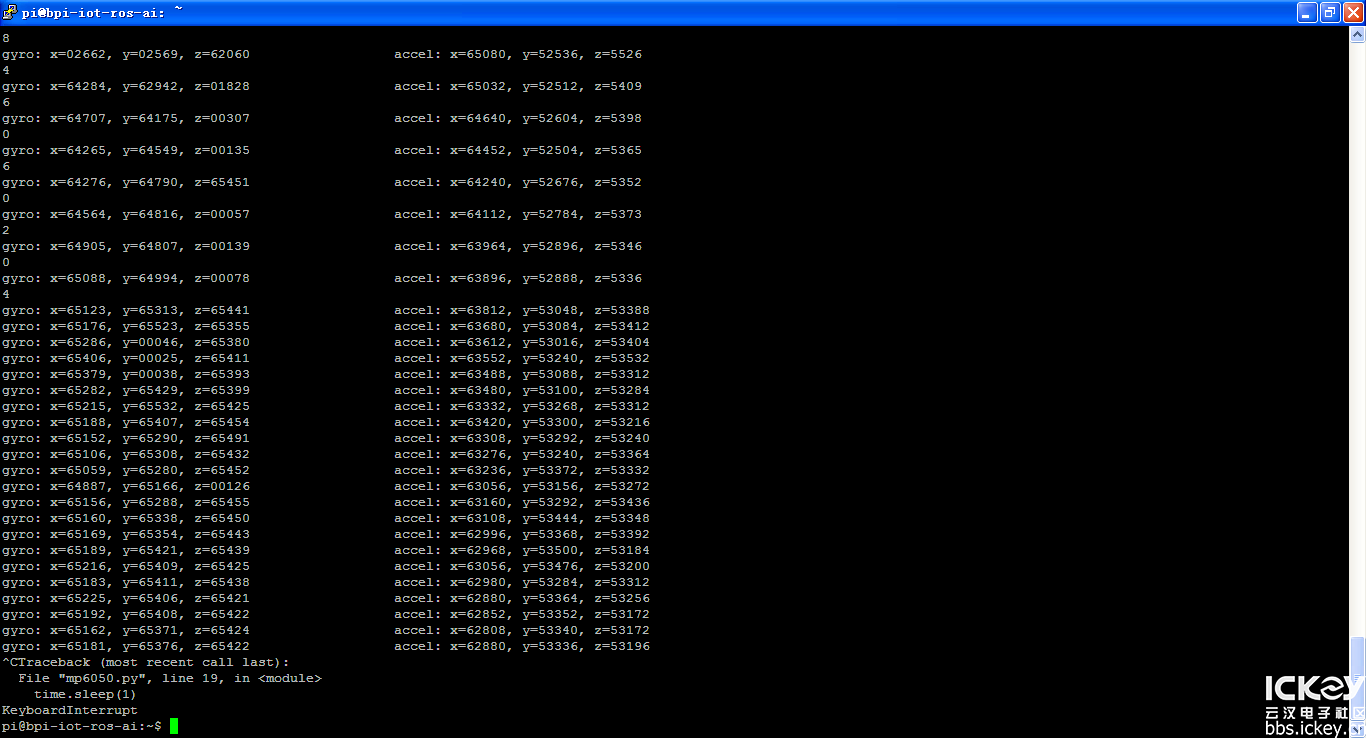
python mp6050.py
The following figure shows the printout of the gy-521 raw data.
Press CTRL + C to stop
Next, create a scaled python data script to read mpu-6050.py.
vi mpu-6050.py
Enter the following code:
import smbus
import math
power_mgmt_1 = 0x6b
power_mgmt_2 = 0x6c
def read_byte(adr):
return bus.read_byte_data(address, adr)
def read_word(adr):
high = bus.read_byte_data(address, adr)
low = bus.read_byte_data(address, adr+1)
val = (high << 8) + low
return val
def read_word_2c(adr):
val = read_word(adr)
if (val >= 0x8000):
return -((65535 - val) + 1)
else:
return val
def dist(a,b):
return math.sqrt((a*a)+(b*b))
def get_y_rotation(x,y,z):
radians = math.atan2(x, dist(y,z))
return -math.degrees(radians)
def get_x_rotation(x,y,z):
radians = math.atan2(y, dist(x,z))
return math.degrees(radians)
bus = smbus.SMBus(2)
address = 0x68
while True:
print "gyro data"
print "---------"
gyro_xout = read_word_2c(0x43)
gyro_yout = read_word_2c(0x45)
gyro_zout = read_word_2c(0x47)
print "gyro_xout: ", gyro_xout, " scaled: ", (gyro_xout / 131)
print "gyro_yout: ", gyro_yout, " scaled: ", (gyro_yout / 131)
print "gyro_zout: ", gyro_zout, " scaled: ", (gyro_zout / 131)
print
print "accelerometer data"
print "------------------"
accel_xout = read_word_2c(0x3b)
accel_yout = read_word_2c(0x3d)
accel_zout = read_word_2c(0x3f)
accel_xout_scaled = accel_xout / 16384.0
accel_yout_scaled = accel_yout / 16384.0
accel_zout_scaled = accel_zout / 16384.0
print "accel_xout: ", accel_xout, " scaled: ", accel_xout_scaled
print "accel_yout: ", accel_yout, " scaled: ", accel_yout_scaled
print "accel_zout: ", accel_zout, " scaled: ", accel_zout_scaled
print "x rotation: " , get_x_rotation(accel_xout_scaled, accel_yout_scaled, accel_zout_scaled)
print "y rotation: " , get_y_rotation(accel_xout_scaled, accel_yout_scaled, accel_zout_scaled)
time.sleep(1)
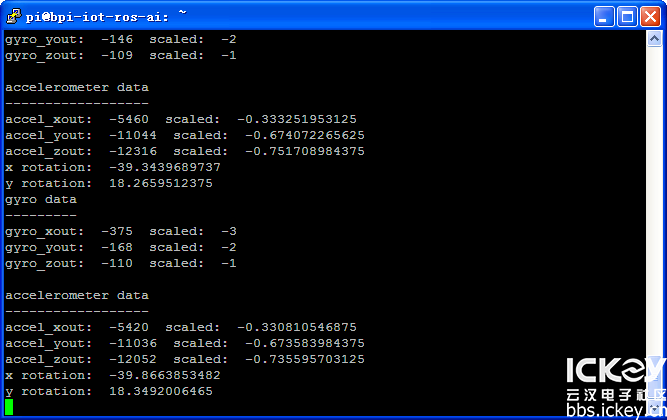
Save and enter the following command to run.
python mpu-6050.py
The data reads as follows: